 English
English 한국어
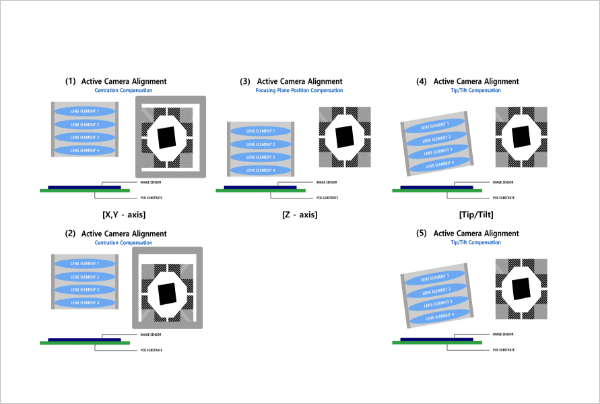
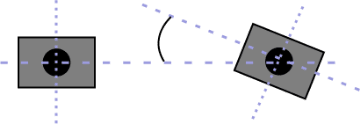
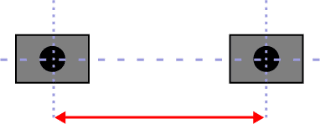
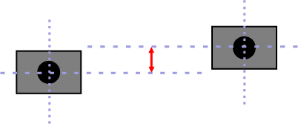
한국어- - Lens와 이미지 센서가 평행한 경우, (1), (2)번 이미지와 같이, X, Y 축의 좌 / 우, 상 / 하 평행 이동 된 상태에 따라 영상이 좌 / 우 상 / 하 로 치우쳐져서 보이게 된다.
- - Lens 센서가 평행하고, X, Y축이 Align이 잘 되어 있는 경우, (3)번 이미지와 같이 Z 축을 따라 거리가 멀어지고 가까워짐에 따라 Focus가 잘 맞을수도 있고 Out Focus가 되기도 한다.
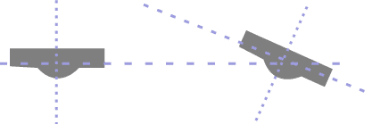
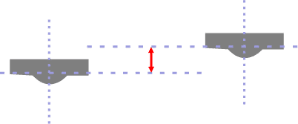
- - X, Y축이 Align이 잘 되어 있는 경우, (4), (5)번 이미지와 같이, X, Y 축 기준으로 Tilt 되어 있으면, 영상의 일부분이 Out Focus 되어 보이게 된다.
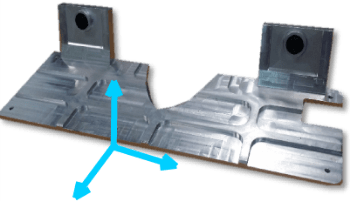
- - 이러한 영상 Defect가 발생하지 않도록 정중앙에 Tilt 없이 최적의 거리를 갖도록 Lens와 Image Sensor의 위치를 Align 하는 것을 Active Align이라 한다.
제품 이론
홈 > 제품소개 > Automotive Solution
Camera Alignment
카메라는 보통 사람의 눈을 대체하여 상을 기록하는 목적으로 만들어집니다. 자율 주행 차량용 카메라, 액션 캠, 블랙박스 카메라 등 우리 주변에
많은 카메라가 고성능, 고해상도를 요구합니다. 기술의 발전에 따라 자연스럽게 카메라의 정렬 정밀도의 요구도 높아지고 있습니다.
많은 카메라가 고성능, 고해상도를 요구합니다. 기술의 발전에 따라 자연스럽게 카메라의 정렬 정밀도의 요구도 높아지고 있습니다.
 GOOD
GOOD BAD
BAD BAD
BAD BAD
BAD
루리텍의 Camera Alignment 검사 알고리즘은 카메라 센서와 렌즈 사이의 위치, 회전, 컬러, 심도 등 다양한 카메라 상태에 대한 솔루션을 제공합니다.
카메라 Alignment (Align Axis)
카메라 해상력 (해상력 평가 단위 환산표) – 용어 및 단위
두 카메라의 상관 관계를 구하기 위한 파라메타
- [ Tilting, Panning ]
-
-
Tiliting
카메라 정면
-
Panning
카메라 윗 쪽에서 바라봄
-
-
- [ Translation X, Y, Z ]
-
-
X
카메라 정면
-
Y
카메라 정면
-
Z
카메라 윗 쪽에서 바라봄
-
Camera Calibration
필요성

- - 광각 카메라를 이용하여 여러장의 영상을 왜곡 보정 및 합성할 경우, 카메라에 의한 영상 왜곡 및 광축 틀어짐 정도를 정확히 파악하여 적용해야 한다.
- - 좌측 그림의 왼쪽은 360 카메라의 출력 영상을 만들기 위해 다수의 광각 이미지들을 합성하여 하나의 이미지로 만든 것을 보여주고 있으며, Image Stitching이 잘 된 것을 볼 수 있다.
- - 왼쪽 그림은 자동차 360도 Around View System의 이미지 합성 과정을 보여주고 있으며, 합성 과정 중 자동차 왼쪽 카메라의 왜곡 Parameter를 잘못 추출하여 적용하였을 경우에 대한 영상 오류를, 붉은색 Box 안에 있는 이미지에서 보여주고 있다.
- - 이러한 영상 왜곡 보정, 영상 합성, Stereo Camera의 거리 측정 정밀도 등을 정확하게 하기 위해서는 카메라의 특성을 나타내주는 Camera Intrinsic / Extrinsic parameter를 정확하게 추출하여 적용해야 한다.
Camera Calibration(Parameter 추출 방법) - Camera Intrinsic / Extrinsic Parameter 추출
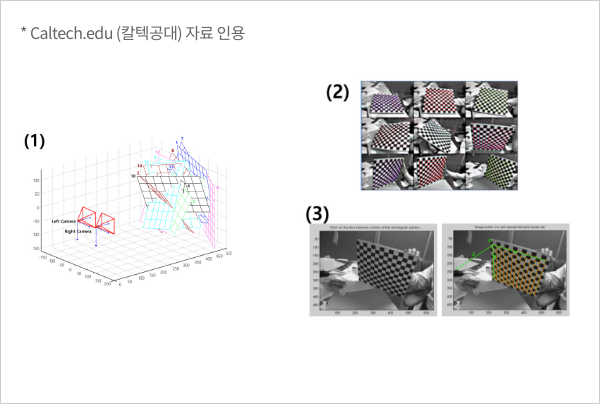
- - 그림 (1)과 같이, Chess Board Chart를 위의 그림과 같이 임의의 각도에서 촬영을 한다.
- - 각각의 이미지로부터 그림 (3)과 같이 Cross Point들을 추출한다.
- - 추출 된 좌표값들을 이용하여 Intrinsic / Extrinsic Parameter를 구하게 된다.
Camera Calibration(Intrinsic/Extrinsic Parameter)
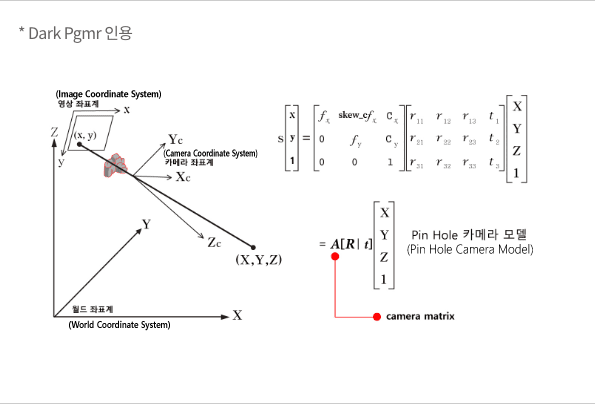
- - 카메라 영상은 3차원 공간 상의 점들을 2차원 이미지 평면에 투사(perspective projection)함으로써 얻어진다.
- - 왼쪽 그림은, 공간 상의 좌표(월드 좌표)와 카메라 내부의 이미지 센서에서의 Pixel 단위의 좌표(영상 좌표)와의 관계를 모델링하여 행렬식으로 나타내고 있다.
- - Calibration은 Pin Hole 모델을 기반으로 만들어져 있다.
- - 이때 월드 좌표를 [X, Y, Z]로 놓고, 이에 대응 되는 영상 좌표를 [x, y]라 하였다.
- - 월드 좌표는 3차원 공간 상의 좌표이며, 영상 좌표는 이미지 평면에 존재하는 2차원 좌표가 된다.
- -이때 행렬식 A는 카메라의 내부에 있는 image Sensor와 Lens와의 상관 관계에 의해 나타내는 특성들을 갖는 Parameter로 내부 파라메터(Intrinsic Parameter)라 한다.
- - 행렬식 [R | t] 는 카메라와 Chess Board Chart와의 상관 관계를 나타내는 회전 변환(Rotation)과 평행 이동(Translation)을 Extrinsic Parameter라 부르게 된다.
Camera Calibration(Lens 왜곡 모델이 포함 된 Parameter)
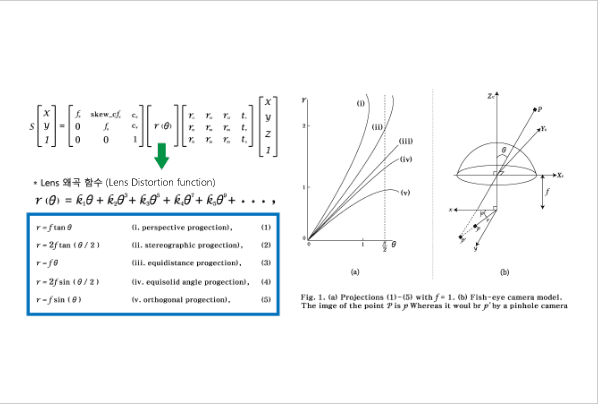
- - Camera Calibration 수행 시 실제로는 Lens 왜곡 모델이 포함 되어 해석 되어야 하며, Lens 왜곡 모델에 따라 Fisheye 모델 / Pin Hole 모델 / Division 모델 등으로 구분 되어 사용 되어지고 있다.
- - 왼쪽과 같이 렌즈의 광축을 기준으로 입사각을 Θ로 하여, 렌즈에 의해 굴절 되는 특성을 tan(), Sin() 함수 등으로 모델링한 해석 등이 사용 되고 있으며, 이중 (1)번 Pin Hole 모델, (3)번 Fisheye 모델 등이 주로 사용 되고 있다.
Camera Parameter(Intrinsic Parameter의 종류)
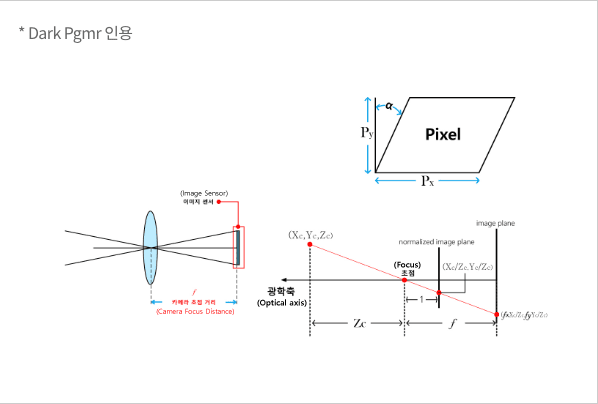
- - 카메라의 내부 파라미터 종류
· 초점 거리(focal length): fx, fy
· 주점(principal point): cx, cy
· 비대칭 계수(skew coefficient): skew_c = tanα - - Camera Calibration 시 사용 되는 Intrinsic Parameter의 길이의 단위는 모두 Pixel이다.
Related Product
 Image Test
Image Test Wide angle camera
Wide angle camera - 사업 문의
 sales@luritech.com
sales@luritech.com  031-689-3696
031-689-3696
