 English
English 한국어
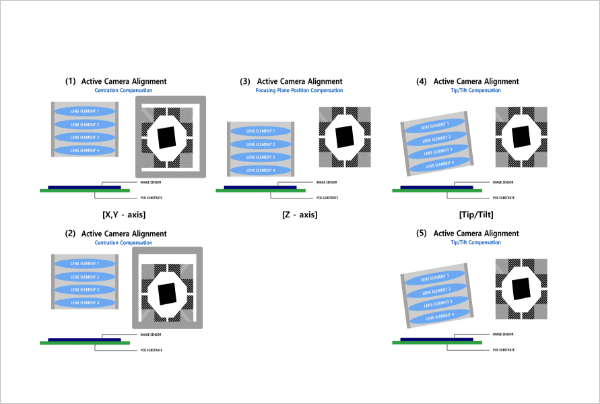
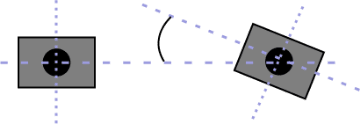
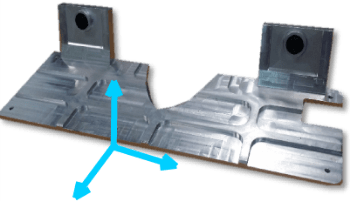
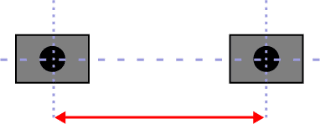
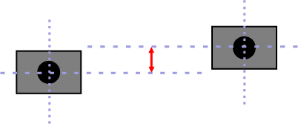
한국어- - When the lens and the image sensor are parallel, as in the images (1) and (2), the image seems to be skewed left/right up/down depending on the left/right, up/down translation of the X and Y axes.
- - If the lens sensor is in parallel and the X and Y axes are well aligned, as in the image (3), as the distance along the Z axis increases and gets closer, the focus may be in or out-focused.
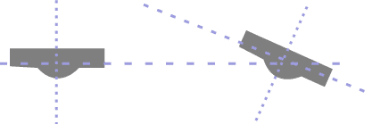
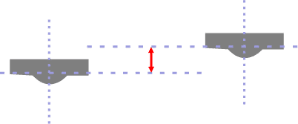
- - If the X and Y axes are well aligned, as in the images (4) and (5), if the X and Y axes are tilted, a part of the image will appear out-focused.
- - Aligning the positions of the lens and image sensor, while keeping them in an optimal distance without a tilt in the center to avoid such image defects, is called Active Align.
Basic Theory
홈 > 제품소개 > Automotive Solution
Camera Alignment
Cameras are usually made for the purpose of recording images by replacing the human eye. Many cameras around us, such as cameras for autonomous vehicles, action cams, and black box cameras, require high performance and high resolution. As technology advances, the demands on camera alignment precision are also increasing.
 GOOD
GOOD BAD
BAD BAD
BAD BAD
BAD
Luritech’s Camera Alignment inspection algorithm includes the position, rotation, color, depth, etc. between the camera sensor and the lens. Also it provides solutions for various camera states.
Camera Alignment(Align Axis)
Camera Resolution (Unit Conversion Table of Resolution Evaluation) - Terms and Units
Parameters for correlation of two cameras
- [ Tilting, Panning ]
-
-
Tiliting
Camera Front View
-
Panning
Camera Top View
-
-
- [ Translation X, Y, Z ]
-
-
X
Camera Front View
-
Y
Camera Front View
-
Z
Camera Top View
-
Camera Calibration
Necessity

- - When correcting distortion and synthesizing multiple images using a wide-angle camera, the degree of image distortion and optical axis distortion by the camera must be accurately identified and applied.
- - The left side of the above figure shows that a number of wide-angle images were synthesized to make an output image of the 360 degree-camera, and that the image stitching was done well.
- - The figure on the right shows the image synthesis process of the car’s 360-degree Around View System, and the image in the red box shows the image error can occur when the distortion parameter of the left camera of the car is incorrectly extracted and applied during the synthesis process.
- - In order to accurately correct the image distortion, image synthesis, and distance measurement precision of the stereo camera, it is necessary to accurately extract and apply the Camera Intrinsic/Extrinsic parameters that indicate the camera’s characteristics.
Camera Calibration - Parameter Extract for intrinsic/Extrinsic of Camera
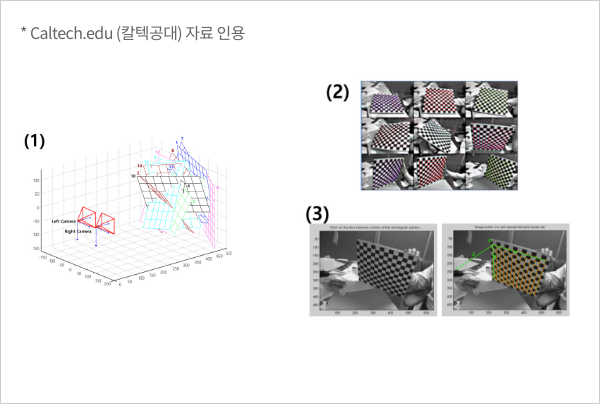
- - The Chess Board Chart is taken from an arbitrary angle as shown in Figure (1).
- - Cross Points are extracted from each image as shown in Figure (3).
- - Intrinsic/Extrinsic parameters are obtained using the extracted coordinates.
Camera Calibration(Intrinsic/Extrinsic Parameter)
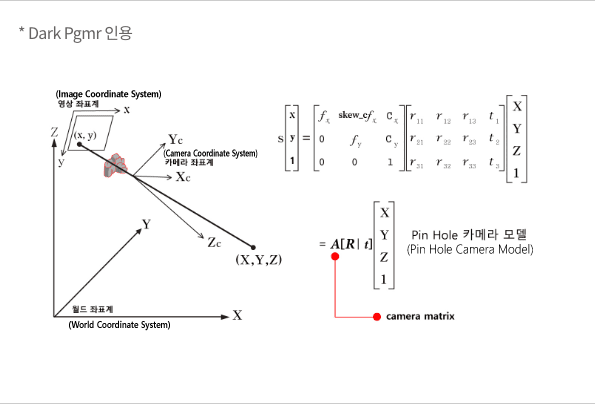
- - A camera image is obtained by projecting points in a three-dimensional space onto a two-dimensional image plane (perspective projection).
- - In the figure above, the relationship between spatial coordinates (world coordinates) and pixel unit coordinates (image coordinates) in the image sensor inside the camera is modeled and expressed as a mathematical matrix.
- - Calibration is made based on the Pin Hole model.
- - At this time, the world coordinates are set to [X,Y,Z], and the corresponding image coordinates are set to [x,y].
- - World coordinates are coordinates in three-dimensional space, and image coordinates become two-dimensional coordinates on the image plane.
- -At this time, the matrix A is a parameter having characteristics indicated by the correlation between the image sensor and the lens inside the camera, and is called an intrinsic parameter.
- - Another matrix [R|t] means rotation and translation which indicates the correlation between the camera and the chess board chart, and is called extrinsic parameters.
Camera Calibration(Parameter with Lens Distortion Model)
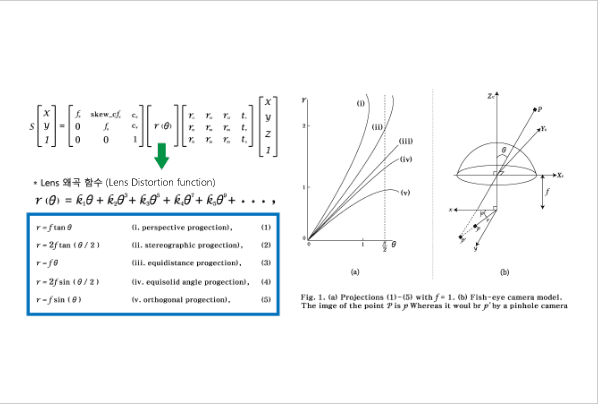
- - When performing Camera Calibration, the lens distortion model should be included and analyzed, and depending on the lens distortion model, it is divided into Fisheye model / Pin Hole model / Division model, etc.
- - As above, with the angle of incidence as Θ with respect to the optical axis of the lens, the analysis that models the refracted characteristics by the lens with tan(), Sin() functions, etc. are used. Among them, (1) Pin Hole model, (3), the Fisheye model are mainly used.
Camera Parameter(Intrinsic Parameters)
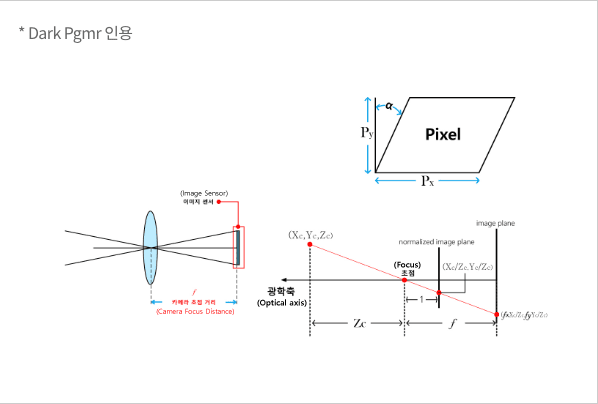
- - Camera’s intrinsic parameters
· focal length: fx, fy
· principal point: cx, cy
· skew coefficient: skew_c = tanα - - The unit of length of Intrinsic Parameter used in Camera Calibration is all Pixels.
Related Product
 Image Test
Image Test Wide angle camera
Wide angle camera - Business
 sales@luritech.com
sales@luritech.com  031-689-3696
031-689-3696
