 English
English 한국어
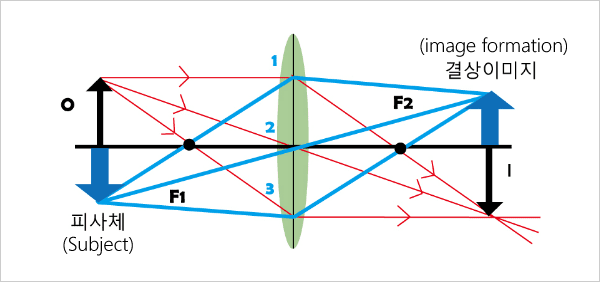
한국어- - 결상은 렌즈를 통해 물체의 상을 만드는 것을 말한다.
- - 왼쪽의 그림에서 보면, 피사체에서 한 점에서 퍼져나간 빛이 사방으로 퍼지며, 이중 렌즈를 통과한 빛들이 다시 한 점으로 모이게 되면 상이 만들어진다.
- - 왼쪽의 그림에서는 대표적으로 2 Point 위치에 대해 빛이 퍼져나가고, 렌즈를 동시에 통과하여 다시 결상 면에 구분 되어 모여지는 것을 보여주고 있다.
- - 이렇게 잘 구분 되어 모여져야만 상이 보이게 되고, 결상 면을 더 지나가거나 덜 온 상태에서는 빛이 서로 섞여 있기 때문에 상을 볼 수 없게 된다. (이미지가 Blur 된 상태)
제품 이론
홈 > 제품소개 > Automotive Solution
Lens Performance
사람 눈의 시력과 선명도는 결국 수정체가 얼마나 잘 수축 / 이완 되는지와 연관됩니다.
카메라에서는 보통 이런 수축 / 이완이 고정 되어 있고, 이는 렌즈와의 정렬 혹은 성능과 연관됩니다.
특히나 높은 시야 각을 지닌 왜곡이 심한 카메라는 왜곡의 중심 역시 중요한 요소입니다.
카메라에서는 보통 이런 수축 / 이완이 고정 되어 있고, 이는 렌즈와의 정렬 혹은 성능과 연관됩니다.
특히나 높은 시야 각을 지닌 왜곡이 심한 카메라는 왜곡의 중심 역시 중요한 요소입니다.
 without distortion
without distortion with distortion(Fish eye)
with distortion(Fish eye) BAD
BAD GOOD
GOOD
루리텍의 Lens Performance 검사 알고리즘은 카메라의 왜곡, Intrinsic parameter 추출, 해상력 검사 (SFR, Grid (TV 本) ) 등
다양한 카메라 생산 환경에 대한 솔루션을 제공합니다.
다양한 카메라 생산 환경에 대한 솔루션을 제공합니다.
결상의 원리
Focus 거리 및 (피사계/초점)심도
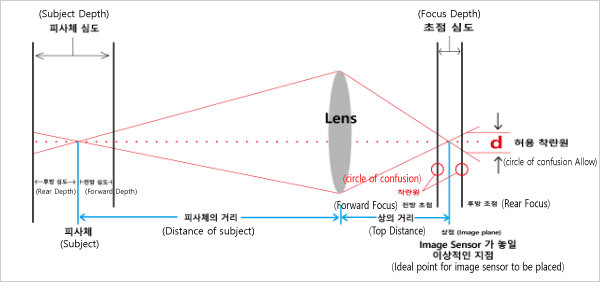
- - 피사체의 한 점에서 퍼져나간 빛은 렌즈를 통과하여 다시 한 점에 모이게 된다.
- - 왼쪽의 그림에서, 피사체의 위치와 렌즈의 위치가 고정 되어 있다고 가정하면, 빛이 다시 모이는 지점은 상점 (Image Plane) 이 된다.
- - 이 Image Plane에 이미지 센서를 가져다 놓게 되면 센서 위의 각 Pixel들이 구분 되어 모여진 빛들은 기기가 각각 받아들여 밝기 차이를 측정하여 화면에 보일 수 있는 Digital Image를 만들게 된다.

- 조리개(aperture)의 크기에 따라 심도가 변함
-
- - 작을수록 Beam이 Sharp해짐.
- - Beam이 Sharp할 수록 심도가 깊어짐.
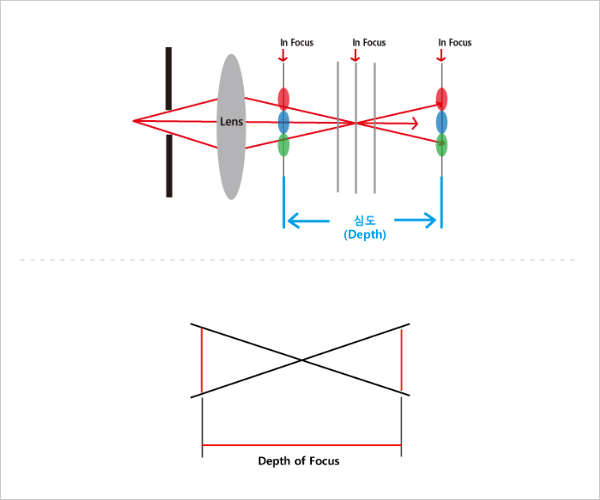
- - 한 점에서 퍼져나간 빛이 다시 한 점으로 모이고, 이때 모인 빛을 Image Sensor의 한 점이 받아들이게 되는데, 위 그림의 왼쪽과 같이 파란색 Pixel로 모든 빛이 모일 수 있는 곳까지가 초점이 맞는 범위 (초점 심도) 가 된다.
- - 위쪽 그림의 Out Focus를 나타내고 있는 지점은, 한 점에서 퍼져나간 빛이 파란색 Pixel에 주로 모이기는 하지만 일부 빛은 붉은색 Pixel과 연두색 Pixel로도 가게 되며, 반대로 붉은색으로 모두 모여야할 빛 중에 일부는 파란색 Pixel로 넘어오므로, 서로 빛이 섞이는 현상 (Image Blur) 이 나타나게 되고 이는 이미지의 선명도가 떨어지는 현상이 나타나게 된다.
- - 따라서, 한 점에서 퍼져나간 빛이 유일하게 하나의 Pixel로 모일 수 있는 부분까지가 초점이 맞는 In Focus 범위이며 이 위치를 초점 심도라 하게 된다.
- - 위쪽 오른쪽 그림의 렌즈의 조리개를 더 작게 닫아서 퍼져나간 빛 중 중심으로 들어오는 빛 만을 통과하도록 한 것이며, 따라서 빔이 매우 Sharp한 형태를 띠게 되며, 동일한 크기의 Pixel에 모두 모일 수 있는 범위가 넓어지게 된다.
- - 이렇게 퍼져나갔다가 다시 모이는 빛의 빔 폭이 얼마나 Sharp한가를 나타내는 척도로 카메라 F Number를 정의 했으며, #F = f / D (f : Focal Length, D : 조리개의 Diameter)
- - #F가 클수록 빔은 Sharp하며, 심도는 매우 깊어서 대상체가 근거리에 있거나, 원거리에 있어도 상대적으로 모두 초점이 잘 맞게 되며, #F가 작을수록 심도가 작아 초점이 맞을 수 있는 범위가 작아지게 된다.
카메라 해상력 (개요)
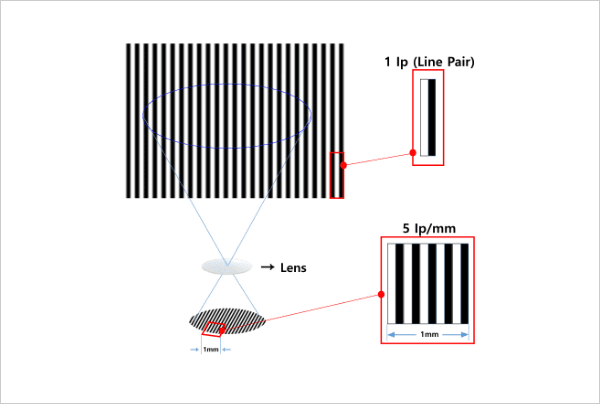
- - 렌즈의 해상력 평가에서는 주로 Lp / mm 단위를 사용한다.
- - 분해 (Black / White 선 구분 가능한 상태) 가 가능한 최대 공간 주파수에서 측정한 Lp / mm가 Resolution (해상력) 으로 정의된다.
- - 좌측 상태는, Lens 결상 (Focal Length) 위치에서의 1mm 당 Line Pair 수가 5 [lp/mm] 이다.
- - 이 경우 1mm 거리에 들어있는 5 Pair (Black and White) Line이 충분히 구분 가능하므로, 5lp / mm 분해능을 충분히 확보한 Lens이다.
- - 더 높은 공간 주파수 (Spatial Frequency) 를 피사체로 놓고 측정 시 분해 (Black / White 선 구분) 가 불가능할 수도 있다.
렌즈 해상력 평가
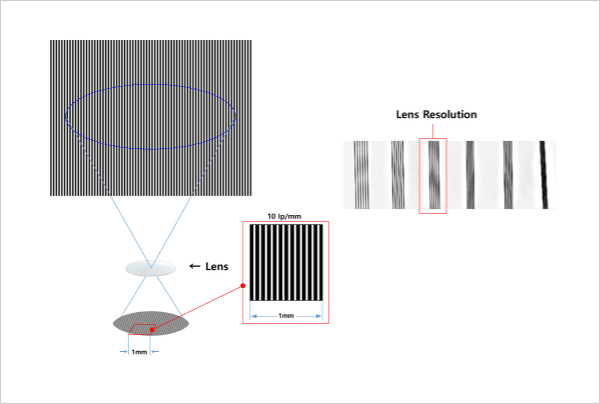
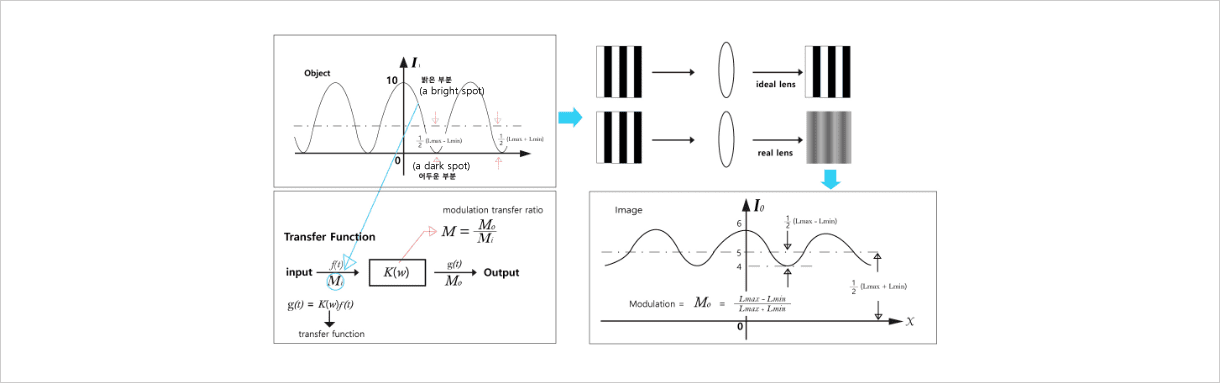
- - 분해 (Black / White 선 구분) 가능한 정도를 정량적으로 정의한 것이 Modulation.
- - 분해가 가능한 최대 공간 주파수에 해당하는 Line Pair가, Lens 결상 면 상의 1mm 안에 몇개 존재하느냐가, Lens의 Resolution(해상력)라 정의 [lp / mm]
- - 좌측 상태는, Lens 결상 (Focal Length) 위치에서의 1mm 당 Line Pair 수가 10 [lp / mm]이다.
- - 이 경우, 10lp / mm 분해능을 갖고 있으나, Modulation 값은 위의 5lp / mm 일 때 보다 낮은 값을 갖게 된다.
카메라 해상력(MTF)
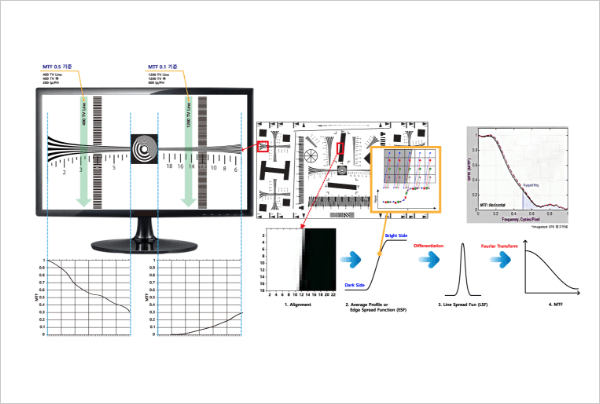
카메라 해상력 (EIAJ 측정 방식)
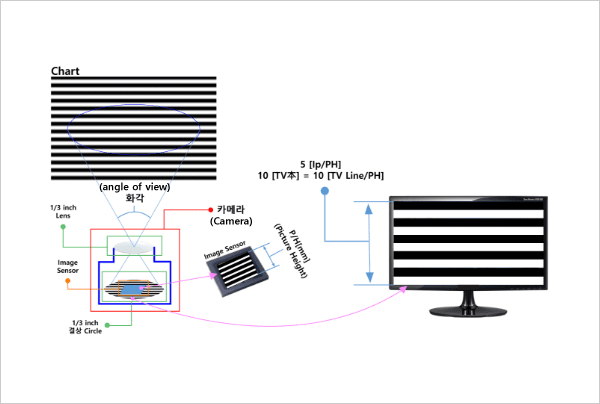
- - 카메라의 해상력은 카메라 출력 영상에 구분하여 표현 가능한 최대 Line (Pair) 수로 나타낸다. (이미지 센서 특성 포함)
- - 일반적으로 Vertical (세로) 방향의 최대 Line 수를 기준으로 한다.
→ PH (Picture Height) 는 Image Sensor 상의 세로 높이 (단위 mm) - - 왼쪽 그림은 5 LP / PH (Line Pair / Picture Height)를 보여주고 있으며,
10 TV Line ( TV本) 을 나타내고 있다. - - [lp/PH] x 2 ↔ [LW/PH] ↔ TV 本 ↔ TV Line
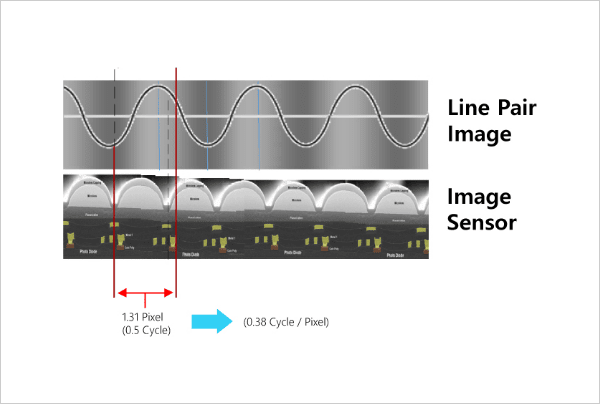
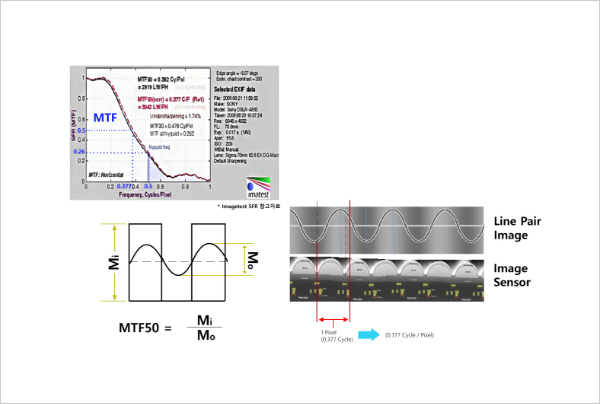
카메라 해상력 (SFR 측정 방식)
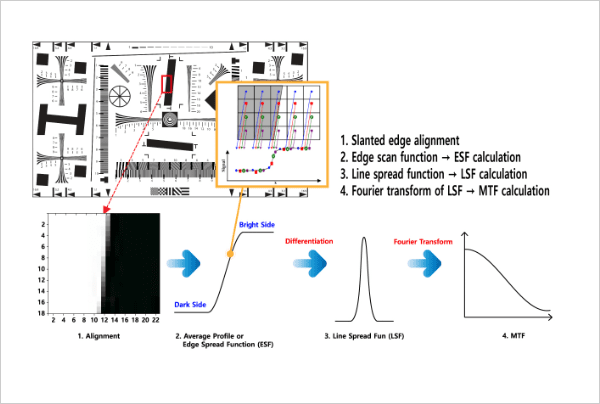
- - Slanted Edge로부터 밝기의 변화 특성을 분석하여 MTF 그래프 산출
- - MTF 그래프에서, 설정 된 MTF 값의 C / P [Cycle / Pixel] 을 구함.
- - C / P로부터 카메라 해상력(표현 가능한 최대 Line 수) 산출
- · [C / P] x 이미지 Vertical Pixel 수 x 2 → TV 本 (LW / PH)
카메라 해상력 (SFR 측정 방식) – 개요
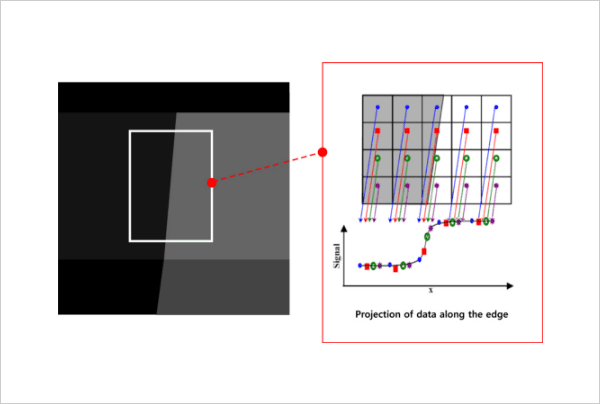
- - 좌측 왼쪽 그림과 같이 Slanted-Edge 부분의 영상 Data를, 오른쪽 그림과 같이 직선 (그래프) 화 함 (ESF).
- - 이때 생기는 영상 변화의 특성을 측정 (분석) 하여 해상력 평가함.
- - 해상력이 좋을수록 경계 부분의 밝기 변화가 급격히 일어남.
- - Focus가 잘 맞을수록 경계 부분의 밝기 변화가 급격히 일어남.
- - 최대 밝기의 10% 지점으로부터 90%지점화 될 때 필요한 Pixel의 수를 측정하여 MTF 값을 산정함.
- - 실제 Data는 이미지 센서로부터 Pixel 단위 읽게되므로, 정수화 되어 있음.
- - 10% 지점과 90% 지점의 위치를 알기 어려움.
- - Fourier transform 및 수학적 변환을 거쳐 연속적 그래프 형태의 함수로 변환.
- - 변환 된 연속 함수로부터 MTF 50% 지점, Nyquest 지점 등 해상력 관련 Parameter 추출함.
카메라 해상력 (SFR 측정 방식) – Slanted Edge 방식의 예
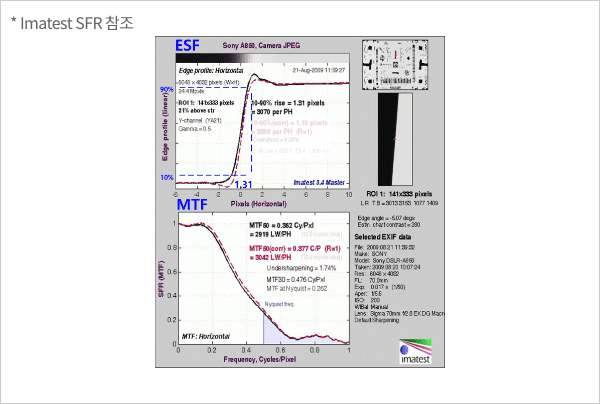
- ESF
-
- - 표준 차트 (ISO-12233) 의 정중앙에서 21% 위쪽 이미지
- - Slanted Edge (약 5도) 의 경사를 가지고 있음.
- - 측정 영역 (ROI) 의 크기는 141 x 333 픽셀임.
- - 밝기가 10%에서 90%로 변할 때 픽셀 차이 (edge rise distance)
- · 밝기가 1회 반전 (0.5Cycle) 되기 위해 필요한 Pixel 수는 1.31임
- · 이미지 센서 (세로) 에서 표현 가능한 Line은 총 3070 TV Line ( 4032 / 1.313355 Pixel = 3070 TV Line)
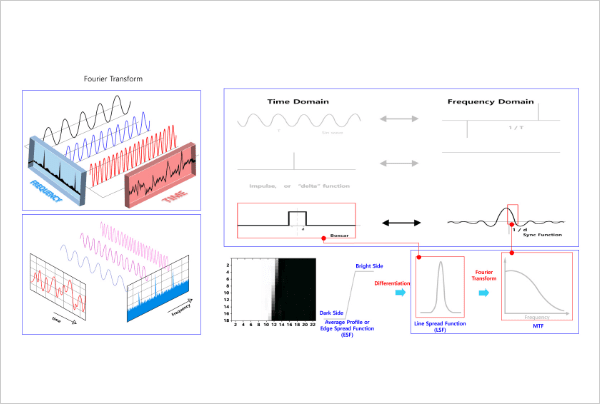
1) ESF
- - Edge Spread Function으로부터 구한 Line Spread Function을, 위의 Delta Function으로 모델링 하여 Fourier Transform을 하게 되면 Sync Function 함수가 구해진다.
- - 이 Sync Function 중 대칭의 중심점으로부터, 1 / d 위치까지를 MTF 함수로 사용하게 된다. (d는 Delta Function의 Pulse Width)
2) MTF
- - X 축은 Cycles / Pixel로, 1에 다가갈수록 고주파 신호
· 한 픽셀에 한 사이클 이상이 들어가는 경우, MTF는 점차 낮아짐. - - 분해능의 한계 주파수 NF (Nyquist frequency)
· NF는 0.5 C / P (Cycle / Pixel) 임.
· NF에서 MTF는 0.262 (26%) 임
· NF 이상의 주파수에서는 aliasing이 발생 (패턴 식별 어려움) - - 일반적으로 MTF가 50%일 때 선명도의 기준으로 적용.
· 왼쪽 그래프에서 MTF 50 값은 0.377 C / P 임
· 이때 해상력은 3042 TV 本 (TV Lien, LW / PH) 임 (0.377 [C / P] x 4032 [pixel] x 2 = 3040.128 LW / PH)
카메라 해상력 (SFR / EIAF 측정 방식 비교)
- - EIAJ Chart Mark (점진적인 선 폭의 변화 형태) 로부터, 각 위치 별 MTF 값을 구하고, 공간 주파수 별 MTF 그래프 산출
· 그래프의 Y축 : MTF 값, X축 : TV 本 (LW / PH) - - MTF 그래프에서, 설정 된 MTF 값의 해상력을 구함
· 해당 위치의 X 값을 읽음. - - 정해진 해상력 값으로부터, 카메라 TV 本 값 산출 가능.
- - Slanted Edge로부터 밝기의 변화 특성을 분석하여 MTF 그래프 산출.
- - MTF 그래프에서, 설정 된 MTF 값의 C / P [Cycle / Pixel] 을 구함.
- - C / P로부터 카메라 해상력 (표현 가능한 최대 Line 수) 산출
· [C / P] x 이미지 Vertical Pixel 수 x 2 → TV 本 (LW / PH) - - 정해진 해상력 값으로부터, 카메라 TV 本 값 산출 가능.
| 구분 | 카메라 해상력 평가 | Lens 평가 | |
|---|---|---|---|
| SFR | EIAJ Chart 방식 | MTF | |
| 사용 마크 |  |
 |
 |
| 측정 Parameter | Slanted Edge의 변화 특성 | 공간 주파수 별 MTF 값 | 공간 주파수 별 MTF 값 |
| MTF 그래프 산출 방식 |
Delta Function (영상 밝기 변화) 의 주파수 별 응답 특성 |
각 공간 주파수 별, 최대 최소 밝기 차이 |
각 공간 주파수 별, 최대 최소 밝기 차이 |
| 평가 속도 특성 | ◎ | △ | △ |
| 해상력 판단 기준 | MTF 값 | MTF 값 | MTF 값 |
| 주요 단위 | [Cycle / Pixel] x Pixel 수 = [lp/PH] | TV Line | lp/mm |
| TV 本 변환 식 | [lp/PH] x 2 TV本 | [TV Line] x 1 TV本 | X |
카메라 해상력 (해상력 평가 단위 환산표) – 용어 및 단위
- - MTF(Modulation Transfer Function)
- - L/mm = Lines per millimeter
- - SFR(Spatial Frequency Response)
- - Cycles/mm = Cycles per millimeter
- - LW/PH = Line width per picture height = TV Line = TV本
- - Cycles/pixel = Cycles per pixel
- - LP/mm = Line pairs per millimeter
- - LP/PH = Line pairs per picture height
| LW/PH TV 本 (TV Line) |
LP/mm | L/mm | Cycles/mm | Cycles/pixel | LP/PH | |
|---|---|---|---|---|---|---|
| LW/PH | x 1 | / [2 x picture height] | / picture height | / [2 x picture height] | / [2 x # vert. pixel] | / 2.0 |
| LP/mm | x [2 x picture height] | x 1 | x 2.0 | x 1 | x pixel pitch | x [picture height] |
| L/mm | x picture height | x 0.5 | x 1 | x 0.5 | x [pixel pitch / 2] | x [picture height / 2] |
| Cycles/mm | x [2 x picture height] | x 1 | x 2.0 | x 1 | x pixel pitch | x [picture height |
| Cycles/pixel | x [2 x # vert. pixel] | / pixel pitch | x [2 / pixel pitch] | / pixel pitch | x 1 | x [# vert. pixel] |
| LP/PH | x 2.0 | / picture height | 2 / picture height | / picture height | / # vert. pixel | x1 |
Related Product
 2D Calibration & Image test
2D Calibration & Image test  2D Calibration
2D Calibration  Lens Inspection
Lens Inspection Image Test
Image Test Distortion optical axis
Distortion optical axis- 사업 문의
 sales@luritech.com
sales@luritech.com  031-689-3696
031-689-3696
